MAS Industrial Robotics
latest
About
Getting started
Contributing
Tutorial
Docker
Perception
Camera
Dataset
Training models
Object Segmentation
Object recognition
Barrier tape detection
Cavity detection
Manipulation
Navigation
Planning
Simulation
Infrastructure
Task
BMT (Basic Manipulation Task) setup
Documentation
Perception Documentation
Manipulation Documentation
Navigation Documentation
Planning Documentation
Simulation Documentation
MAS Industrial Robotics
Perception
Edit on GitHub
Perception
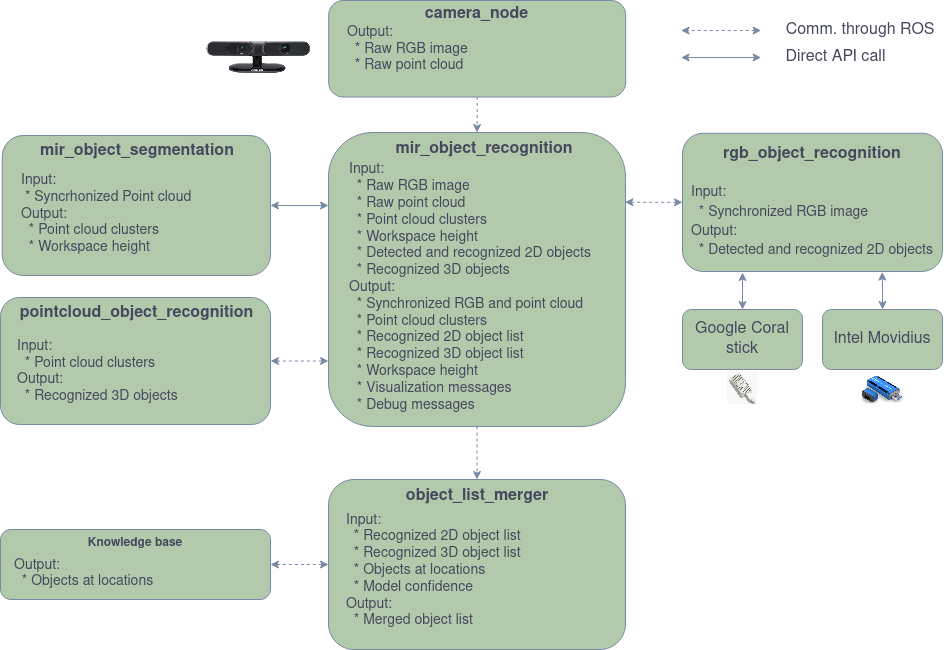
Robot perception architecture
Robot perception architecture
Camera
Tower-mount camera calibration
RealSense2 camera
Dataset
Dataset collection
3D dataset collection
2D dataset collection
Dataset preprocessing
3D dataset preprocessing
2D dataset preprocessing
Training models
Traning point cloud classification
Training deep learning model
Adding new model
Training 2D object detection
Object Segmentation
3D object segmentation
mir_object_segmentation
package
mir_object_recognition
package
Object recognition
3D object recognition models
2D object recognition models
Multimodal object recognition
Barrier tape detection
Cavity detection