Refbox parser
This node contains components to store the world model of the environment and the goal of the tasks in the knowledge base of the robot. World model is defined as the locations and properties of different moveable objects(eg: robot, box etc) in the environment. The world model node has to subscribe to the incoming data stream which informs of the current state of the world.(Eg : Refree box) It then has to store this value in the any format which can be utilized for other components.
Requirements
sudo apt-get install flex ros-indigo-mongodb-store ros-indigo-tf2-bullet freeglut3-dev
-
The following folders are not required they can be avoided by
$> touch CATKIN_IGNOREinside the respective directories - rosplan_demos - rosplan_interface_mapping - rosplan_interface_movebase
Usage
Launch the component (example):
roslaunch mir_refbox_parser refbox_parser.launch
Testing
We need the Knowledge base service running to test the loading of knowledge base
roslaunch mir_pddl_problem_generator rosplan_knowledge_base_example.launch
Before running the test the file has to be copied to the
mir_pddl_problem_generator/ros/test/example_domainfolder.For testing navigation we need the navigation action server
roslaunch mir_move_base_safe move_base.launch
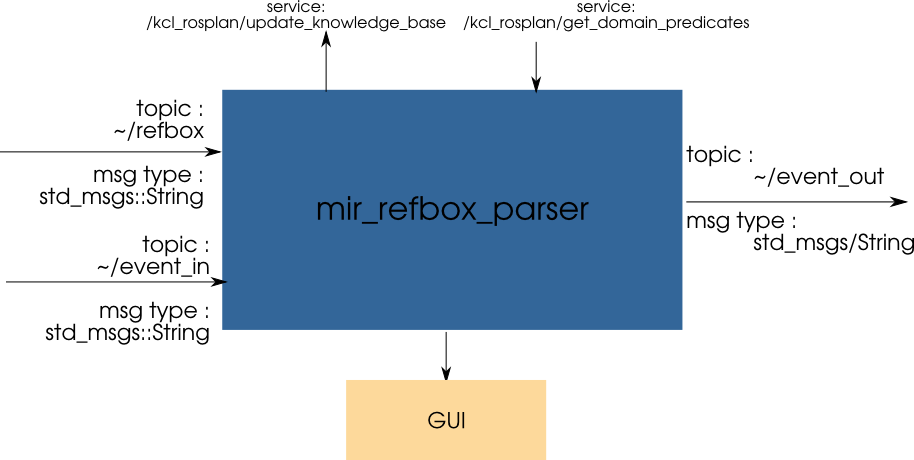
Input(s)
event_in: trigger to start the node.
refbox: the ros topic string format on which the BTT, BNT, BPT, BMT, CBT messages is being published
Output(s)
e_status: Returns if the data storage ws successful